ハンドル形電動車いす使用者の走行空間に対する注視特性に関する基礎的研究 (344-6)
北翔大学間福祉学部医療福祉学科 石橋達勇
ハンドル形電動車いす、空間認知、注視特性、アイマークレコーダ、走行イメージ
| 研究目的 | 近年、ハンドル形電動車いす(以下、ハンドル形車いす)使用者の操作ミスが原因と思われる事例が散見される。この操作ミスの発生原因の一つとして、筆者らは使用者の走行空間内における走行イメージと、ハンドル形車いす自体の走行状況との間に「差異」がある為、つまり使用者が想定している走行イメージと実際のハンドル形車いすの動きが一致していないことが大きな理由と考えた(図1参照)。 これにより、事故発生構造の解明と共に、事故予防やハンドル形車いす使用者に対する事前教育の教材開発が進展し、最終的に誰もが安全・快適に使用できる移動空間の環境整備に貢献できると考えた。 |
| 研究手順 | 1)ハンドル形車いすが関連した事故事例の収集と状況分析 |
| 研究成果 | 有効データとして収集できた男女各2名ずつ計4名のデータを分析対象とし、その結果以下のこと等が明らかとなった。 |
図1 ハンドル形電動車いす走行時における各要素間の関係モデル |
|
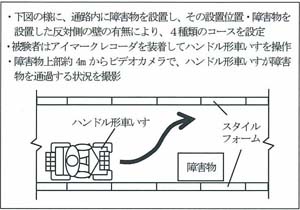
図2 走行実験の概要 |
|
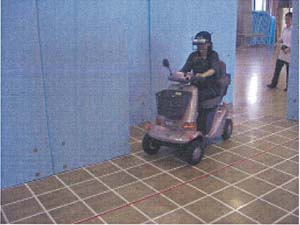
図3 走行実験の様子 |


CopyRight©Foundation for Promoting Personal Mobility and Ecological Transportation all Right Reserved.